
| Оборудование по резине |
 |
Оборудование производства ДСП |
Кинематическая схема
Кинематическая схема отражает связи между механическими элементами станка и предназначена для определения положений звеньев, траекторий отдельных точек, линейных и угловых скоростей и ускорений отдельных точек механизма. В деревообрабатывающих станках кинематические схемы используют для определения скоростей резания и подачи, перемещений подвижных его элементов, траекторий движения отдельных органов.
Кинематические схемы выполняются как в аксонометрии, так и на плоскости. Элементы кинематических схем изображаются условно в соответствии с ГОСТами. Движение от двигателя к исполнительным органам передается по кинематическим цепям, состоящим из отдельных звеньев (ступеней), называемых кинематическими парами. Каждая кинематическая пара и вся кинематическая цепь в целом характеризуются передаточным отношением
где n1, n2 - частота вращения ведущего и ведомого валов соответственно.
Передачи, у которых n1> n2, - замедляющие, их называют редукторами. Передачи, у которых n1<n2, - ускоряющие, их называют мультипликаторами. В машиностроении чаще возникает необходимость в уменьшении частоты вращения, поэтому замедляющие механизмы (редукторы) нашли более широкое применение. Редукторы позволяют применять быстроходные, а следовательно, малогабаритные и более дешевые электродвигатели при тихоходных рабочих машинах, малые скорости движения которых обусловливаются требованиями технологического процесса. У замедляющих передач i>1, у ускоряющих i<1.
Передаточное отношение может быть выражено не только как отношение частот вращения валов, но и через отношение размеров кинематических элементов. Для ременных, фрикционных, зубчатых и цепных передач
Для зубчатых и цепных передач передаточное отношение можно определять через число зубьев колес (звездочек)
где z2, z1 - число зубьев ведущего и ведомого колеса (звездочки) соответственно.
Для червячной передачи
где z1 - число заходов червяка; z2 - число зубьев червячного колеса.
При определении i расчетные диаметры кинематических элементов принимают следующие:
для плоскоременных передач
где dm - диаметр шкива; δ - толщина ремня;
для клиноременных передач d соответствует диаметру шкива, по которому располагается нейтральный слой ремня;
для зубчатых и червячных колес и звездочек цепных передач учитывается диаметр делительной окружности, равный:
для зубчатых с прямым зубом и червячных колес
для косозубых колес
для звездочек
где m - модуль, мм; t - шаг цепи, мм; β - угол наклона зуба, град.
В ременных и фрикционных передачах наблюдается проскальзывание между элементами передачи, поэтому в формулу передаточного отношения нужно ввести уточнение:
где ζ, - коэффициент скольжения (для фрикционных передач 0,995-0,95; плоскоременных 0,99; клиноременных 0,98).
В приводах деревообрабатывающих станков имеются клиноремен-ные вариаторы с постоянным межосевым расстоянием и с изменяемыми диаметрами ведущего d1, и ведомого d2 шкивов, причем d1min- d2min и d1max = d2max. Для таких вариантов соотношение между наибольшим и наименьшим диаметром каждого шкива будет
где D - диапазон регулирования.
Если кинематическая схема включает в себя несколько кинематических пар (ступеней), соединенных последовательно, общее передаточное отношение i равно произведению передаточных отношений i1, i2, i3 ... дельных ступеней:
Задача кинематического расчета- определение скорости подачи и резания, величины настроечных перемещений, ходов подающих элементов. Расчетам предшествует вычерчивание кинематической схемы машины (рис. 1) в соответствии с ГОСТом с обязательным нанесением численных характеристик кинематических звеньев: мощности и частоты вращения электродвигателей, числа зубьев зубчатых передач, диаметров шкивов и т. п. Расчет удобно вести в виде таблицы, куда подставляют данные расчета против каждого номера элемента цепи.
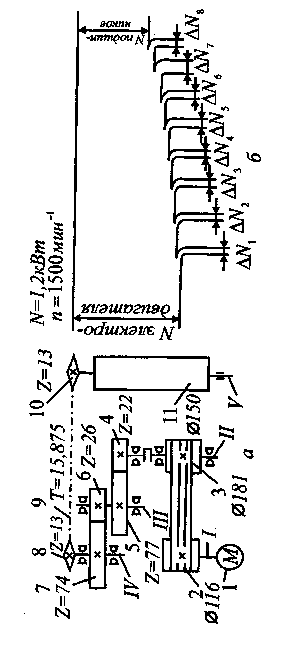
Расчет потерь мощности ведется в табличной форме следующим образом, Подводимую к каждому очередному элементу мощность N умножают на КПД этого элемента. Разность между подводимой мощностью и полученной после перемножения будет величиной потери мощности AN на этом элементе.
Рассмотрение порядка расчета приведено для кинематической цепи (рис. 1, а), а примерный баланс мощности для этой схемы изображен на рис. 1, б.
 |
Оборудование для переработки шин в крошку |